Video wird nicht angezeigt, weil Drittanbieter-Cookies nicht zugelassen sind.
Robotik und Industrielle Bildverarbeitung
Industrieroboter sind heute überall in der industriellen Fertigung verbreitet – Tendenz stark steigend. Studierende einer ingenieurwissenschaftlich geprägten Fachhochschule interessieren sich für viele Teilaspekte der Thematik Robotik.
Wie funktioniert ein Roboter? Wie mache ich einen Roboter intelligent? Wie kann ich den Bewegungsablauf einer Roboterhand im dreidimensionalen Raum programmieren? Wie binde ich einen Roboter in einen komplexen Arbeitszyklus ein? Das sind nur einige Fragen, die sie zu beantworten lernen.

Um den Handlungsspielraum eines Roboters flexibler zu machen, stattet man ihn über Kameras mit einem begrenzten Sehvermögen aus. Auf diese Weise kann er Veränderungen seiner Umwelt wahrnehmen und dadurch zum Teil selbstständig agieren. Dazu nutzt die Industrielle Bildverarbeitung als Teildisziplin der Angewandten Informatik mathematische Verfahren. Diese bereiten visuelle Informationen (z.B. von einer Kamera aufgezeichnete Bilder) auf, interpretiert sie und gewinnt daraus die wesentlichen Daten für weitergehende Verarbeitungsschritte.
Das Labor für Robotik und Industrielle Bildverarbeitung der FH Wedel befindet sich im 1. Obergeschoss des EDV-Gebäudes.










Ausstattung
Die informationstechnische Infrastruktur besteht aus mehreren PC-Arbeitsplätzen sowie Steuerungsrechnern für die Programmierung der verschiedenen Roboter. Zu der dauerhaften Ausstattung des Labors gehören darüber hinaus folgende Geräte:
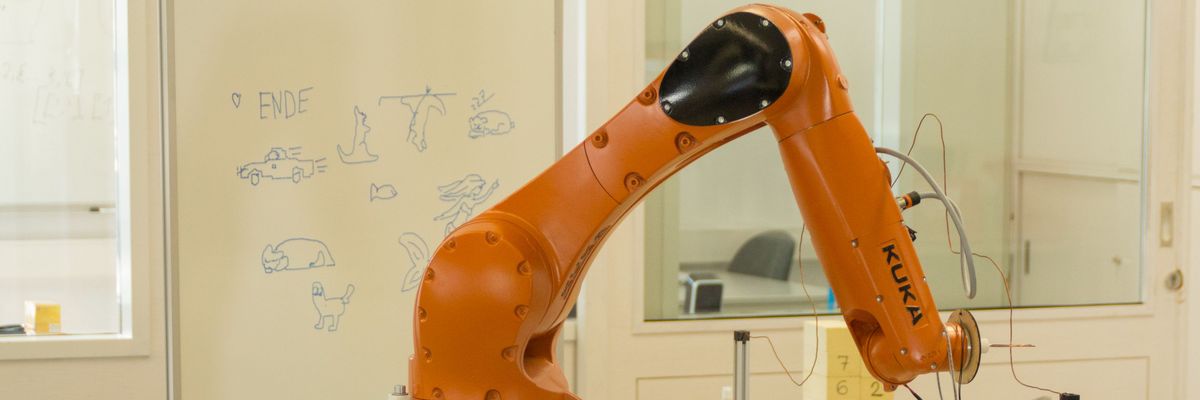
- der KUKA Agilus KR-6 R900 sixx ist ein moderner 6-Achsen-Industrieroboter
- zwei autonom fahrende ADAS Modellfahrzeuge der Firma BFFT
- zwei vielseitig anpassbare mobile Roboter auf Basis der Eddie Plattform
Für die Bildverarbeitung stehen optische Spezialsensoren und verschiedene Kameras zur Verfügung, unter anderem kompakte Industriekameras von Basler und Cognex. Je nach Anwendungsbereich werden Laserscanner oder Kameras zum Sammeln von Tiefeninformationen verwendet. Die Softwareumgebung haben wir entsprechend der genutzten Komponenten ausgewählt:
- Das Robot Operating System (ROS) bildet die Basis zur Programmierung der autonom fahrenden Roboter
- Die vielfach eingesetzte Bibliothek OpenCV wird für die Aufgaben des maschinellen Sehens eingesetzt
- RoboDK für die Simulation des Industrieroboters
Die Softwareentwicklung findet häufig unter Linux mit Python und dem GCC für C++ statt. Aus Gründen der Kompatibilität mit bestehenden Komponenten nutzen wir aber auch Microsoft Visual C++ unter Windows.
Einbindung in Lehre und Forschung
Diesen Laborbereich nutzen Studierende der Fachbereiche Technische Informatik, Informatik, IT-Ingenieurwesen und Wirtschaftsingenieurwesen.
Im Mittelpunkt ihrer Praktika stehen Handhabungs- und Bildverarbeitungsaufgaben sowie deren Kombination für Aufgaben im Bereich autonomes Fahren oder Hand-Auge-Koordination. Indem die Studierenden Geräte sowohl aus dem industriellen Umfeld als auch dem Endverbraucherangebot verwenden, üben sie die Arbeit in professionellem Kontext ein. Gleichzeitig unterstützen wir stets die Fortbildung in Eigeninitiative im heimischen Umfeld.
Zum Ende der Bachelor-Ausbildung ist die Studienleistung Laborprojekt vorgesehen. Hier widmen sich die Studierenden der Weiterentwicklung der Laborinfrastruktur. Die Projektarbeiten kommen somit nachfolgenden Studierenden zugute. Beispiele hierfür sind:
- das ROS ADAS Paket zum Arbeiten mit den ADAS Modellfahrzeugen
- das ROS pylon Paket ausgerichtet auf hohe Bildraten
- weitere Hilfssoftware, mit der wir unsere Industrieroboter ansteuern
Betreuung
